Joint Rotary Actuators Series HAT
Joint Rotary Actuators Series HAT Joint Rotary Actuators series HAS
Joint Rotary Actuators series HAS Joint Rotary Actuators Series HAMF
Joint Rotary Actuators Series HAMF Frameless Torque Motor HBM
Frameless Torque Motor HBM Rotary Actuators
Rotary Actuators Joint Rotary Actuators Series HAG
Joint Rotary Actuators Series HAG Rotary Actuators Series HPG
Rotary Actuators Series HPG
The landscape of industrial automation is shifting. The rigid, caged robots of the past are giving way to Collaborative Robots, or “Cobots,” designed to work safely alongside humans. But building a cobot is significantly harder than building a traditional robot. The challenge lies in the “joints”—they must be lightweight, powerful, safe, and incredibly compact.
This engineering hurdle has given rise to the robotic joint module. These integrated, plug-and-play actuators are the hidden engine behind the cobot revolution. Here are 5 ways these modules are changing the game.
1. Unmatched Compactness Through All-in-One Integration
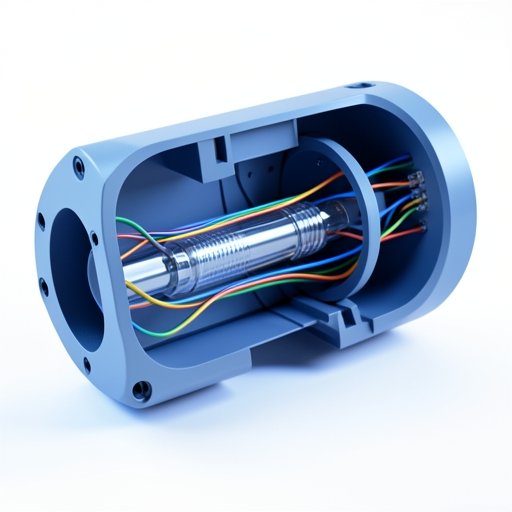
In traditional robotics, engineers had to source a motor, a gearbox, a brake, an encoder, and a drive separately, then figure out how to bolt them all together. This resulted in bulky, heavy arms with complex external wiring.

Combining Motor, Gearbox, Brake, and Encoder
A robotic joint module solves this by integrating all these components into a single, seamless housing. It combines a high-performance frameless torque motor, a precision harmonic reducer, a safety brake, and dual encoders into one unit.
How High Integration Enables Sleek Cobot Design
This extreme integration allows for the sleek, snag-free designs that define modern cobots. By eliminating external cable harnesses and bulky transmission housings, robot arms can be lighter and more agile, fitting into tighter spaces on the factory floor.
2. Accelerating Time-to-Market with Modular Architecture
For robot manufacturers, speed is everything. Developing a custom joint actuator from scratch can take years of R&D and testing.
Moving from Component Selection to Plug-and-Play
Modular joints turn robot design into a “Lego-like” experience. Engineers can select pre-validated modules for the base, elbow, and wrist, and assemble a prototype in weeks rather than years.
Reducing R&D Cycles for Robot Manufacturers
By outsourcing the complex actuator engineering to specialists like Hobber Drive, robot companies can focus their R&D resources on software, vision systems, and end-of-arm tooling—the areas where they can truly differentiate their product. This significantly lowers the barrier to entry for new automation startups.
3. Enhancing Safety and Precision with Advanced Sensing
Safety is the defining feature of a cobot actuator. If a robot hits a human, it must stop immediately. Traditional industrial motors often lack the sensitivity required for this collision detection.

The Role of Integrated Torque Sensors
Advanced robotic joint modules often include integrated torque sensors or current-based sensing algorithms. These allow the robot to “feel” external forces.
Achieving Precise Force Control for Safe Interaction
This capability enables “force control,” allowing the cobot to handle delicate tasks or stop instantly upon contact with a worker. This level of sensitivity is difficult to achieve with disparate components but is standard in high-end integrated modules.
4. Superior Torque Density via Strain Wave Gearing
Cobots need to be lightweight to be safe, but they also need to lift heavy payloads. This requires a transmission system with an exceptional torque-to-weight ratio.
Why Cobots Rely on Harmonic Reducers
Most high-performance joint modules utilize strain wave gear technology (harmonic reducers). Unlike planetary gears, strain wave gears offer zero backlash and incredibly high reduction ratios in a flat, lightweight package.
Delivering High Payload Capacity in a Light Package
By integrating these specialized gears, a compact robotic joint module can generate the massive torque needed for a robot’s shoulder or elbow joint without adding excessive weight. To see this technology in detail, you can .
5. Simplified Maintenance and Scalability
In a fast-paced production environment, downtime is costly. Modular design revolutionizes how robots are maintained and scaled.
Modular Replacement vs. Complex Repairs
If a joint fails in a traditional robot, repairing it is a complex, day-long task involving grease, gears, and recalibration. With a modular robot, a technician can simply unbolt the faulty joint module and replace it with a new one in minutes, getting the line back up and running immediately.
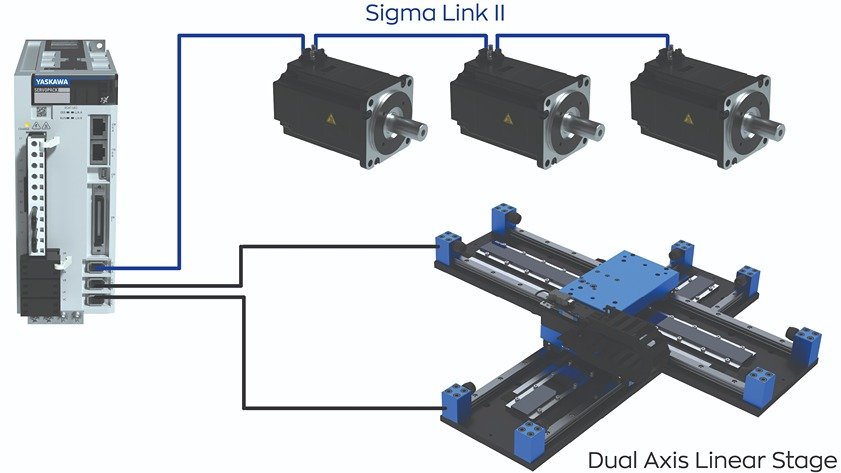
Easily Scaling from 3-Axis to 7-Axis Configurations
The modular nature allows manufacturers to create entire families of robots using the same set of parts. A 3-axis palletizing robot and a 7-axis surgical robot might use different quantities of the exact same robotic joint module, simplifying supply chain management.
Conclusion: The Future of Automation is Modular
The robotic joint module is not just a component; it is an enabler of innovation. By solving the hardest mechanical challenges—size, power, and safety—in a single package, these modules are democratizing robotics. They allow engineers to build robots faster, cheaper, and better than ever before.
As industrial automation continues to evolve, the demand for flexible, modular solutions will only grow. Are you ready to build your next breakthrough robot? You can to find the perfect fit for your design.
FAQ Section: Common Questions About Cobot Actuators
Q1: What is included in a typical robotic joint module? A standard module includes a frameless torque motor, a harmonic reducer (gearbox), a holding brake, absolute encoders (for motor and output side), and often an integrated servo drive.
Q2: Can I use these modules for non-cobot applications? Absolutely. While ideal for cobots, they are widely used in medical equipment, semiconductor handling robots, high-end CNC indexing tables, and aerospace gimbals due to their precision and compactness.
Q3: How do I control a Hobber robotic joint module? Our modules typically support standard industrial communication protocols like EtherCAT or CANopen. You can connect them directly to your master controller (PLC or Robot Controller). For specific integration support, please .
Q4: What is the lifespan of a modular joint?