In the world of industrial automation, precision is currency. Yet, there is a “silent killer” that undermines the performance of even the most sophisticated control algorithms: Backlash.
Simply put, backlash is the mechanical play or gap between mating components, such as gear teeth. While a small amount of play is necessary in standard machinery to prevent jamming, in precision motion systems, it is the enemy. It causes positioning errors that cannot be corrected by encoders on the motor side, leads to system oscillation, and creates audible noise during direction reversals.
This guide explores the root causes of backlash, why traditional fixes often fail, and how upgrading to zero backlash hardware—like the solutions provided by Hobber Drive—is the ultimate strategy for backlash elimination.
What is Backlash and How Does it Affect Your System?
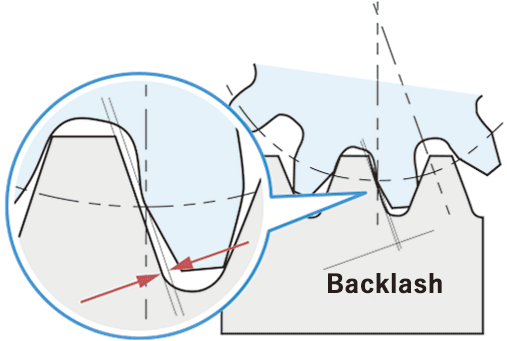
To solve a problem, you must first define it accurately. In a gear train, backlash is the amount of clearance between the mating gear teeth. When the motor reverses direction, it must rotate through this gap before it engages the load again.
The Difference Between Backlash, Lost Motion, and Hysteresis
Engineers often use these terms interchangeably, but they are distinct:
-
Backlash: The physical gap or clearance. It is non-linear and hard to control.
-
Lost Motion: A broader term that includes backlash plus the elastic deformation (springiness) of the system under load.
-
Hysteresis: The difference in position when approaching a point from opposite directions, caused by friction and magnetic effects.
Impact on Robot Arm Accuracy and Repeatability
For a 6-axis robotic arm, backlash creates a compounding error. A tiny amount of play at the base joint (e.g., 1 arc-minute) is amplified by the length of the arm, resulting in millimeters of error at the tool tip. This destroys robot arm accuracy and makes tasks like precision assembly or laser welding impossible.
Tuning Headaches: How Backlash Causes Oscillation and Noise
Backlash introduces a “dead zone” in the control loop. When the servo system tries to hold a position, the load might drift within this gap. The controller responds by increasing power, causing the motor to slam into the other side of the gear tooth. This cycle creates “hunting” or oscillation, resulting in vibration and noise that limits the system’s gain and bandwidth.
Traditional Methods to Reduce Backlash (And Why They Fail)
Before advanced hardware became accessible, engineers used various workarounds to mitigate backlash.
Software Compensation: A Band-Aid Solution
Most modern servo drives include “backlash compensation” parameters. The controller adds a specific number of pulses whenever the direction changes to “jump” across the gap. While helpful, this is reactive, not predictive. It cannot account for wear over time or uneven gear teeth, and it often creates jerky motion at the reversal point.
Mechanical Preloading: Springs and Split Gears
Traditional anti-backlash gears use split designs loaded with springs to pinch the mating gear. While this reduces the gap, it significantly increases friction and wear.
The Trade-off: Reduced Backlash vs. Increased Friction
In traditional gearing, tightening the mesh to reduce backlash almost always results in higher friction, heat generation, and reduced efficiency. This requires larger motors and limits the system’s lifespan.
The Ultimate Solution: Moving to Zero Backlash Technologies
The only true way to solve the problem is to eliminate the gap entirely through superior mechanical design. This is where Hobber Drive specializes.
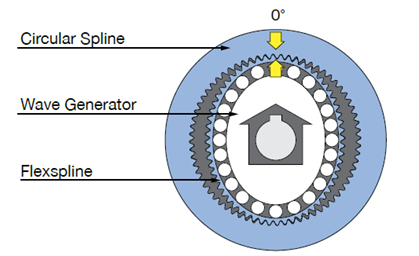
Harmonic Drives (Strain Wave Gears): Elasticity Instead of Gaps
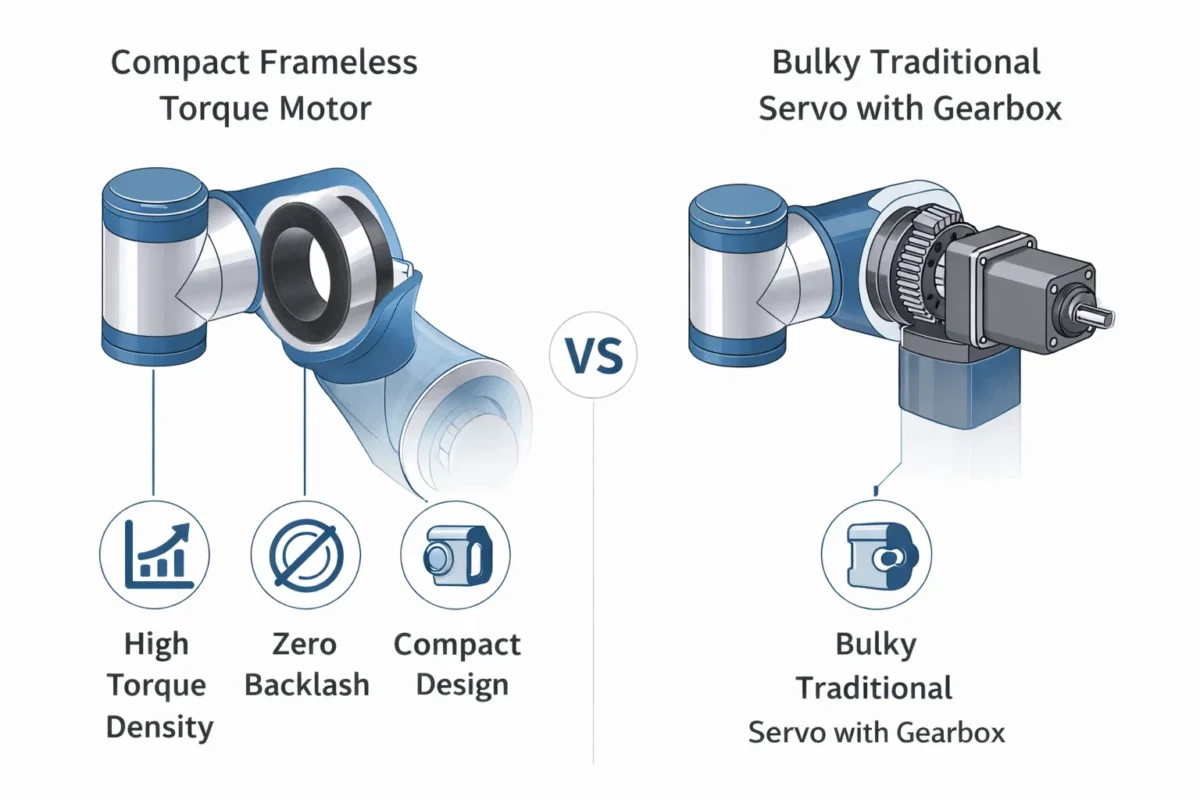
Harmonic drive technology (or strain wave gearing) fundamentally changes the game. Instead of rigid teeth meshing with a gap, it uses a flexible cup (Flexspline) that deforms into an elliptical shape.
This deformation ensures that teeth are engaged continuously at two opposite points with a pre-load. The result is inherently zero backlash and high torque density in a compact package. This is the technology powering our HAT and HAMF actuators. You can to see how this design fits into robotic joints.
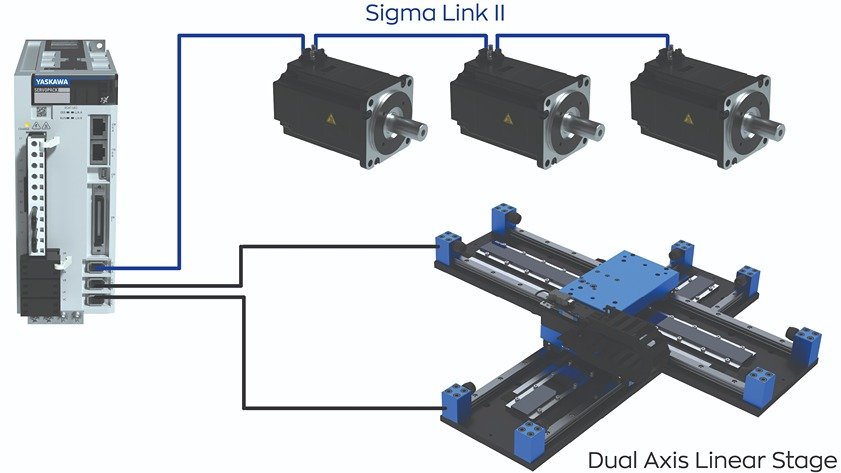
Direct Drive Motors: Eliminating the Transmission Entirely
The most radical solution is to remove the transmission altogether. Direct drive motors (like our HBM series) couple the load directly to the rotor. With no gears, there is physically no mechanism to create backlash. This offers the ultimate in dynamic response and stiffness. For applications demanding pure precision, are the gold standard.
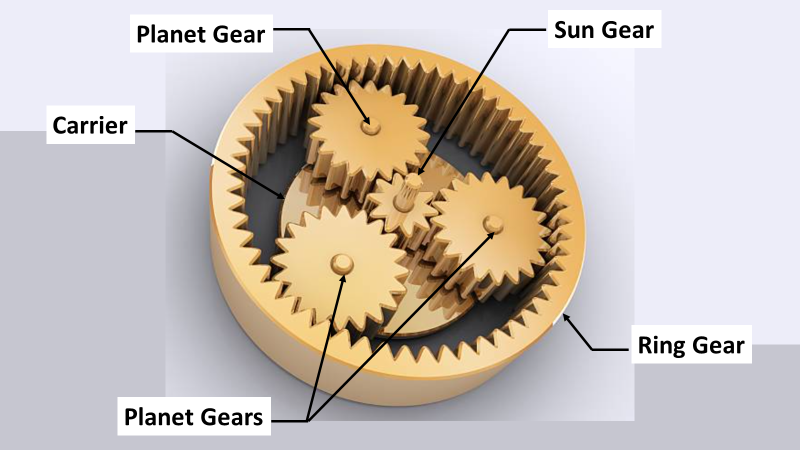
Planetary Gearboxes with High-Precision Gearing
For applications requiring extreme rigidity, high-precision planetary gearboxes (like our HPG series) are manufactured with such tight tolerances that backlash is reduced to < 1-3 arc-minutes. While not theoretically “zero,” it is virtually negligible for heavy-duty industrial tasks.
Industries Where Zero Backlash is Non-Negotiable
Why invest in zero backlash technology? In some sectors, it is not a luxury; it is a requirement.

Semiconductor Manufacturing and Optics
In wafer handling and optical inspection, positioning errors are measured in microns. Any vibration or lost motion can ruin expensive product yields.
Laser Cutting and Precision Welding
Laser heads must follow complex contours without stopping or stuttering. Backlash during direction changes causes visible marks or defects in the cut edge.
Medical Robotics and Surgical Assistance
In surgical robotics, the robot is an extension of the surgeon’s hand. The motion must be perfectly smooth and predictable; “play” in the joints is unacceptable for patient safety.
Conclusion: Precision Starts at the Source
While software compensation and mechanical tweaks can mitigate the symptoms, they do not cure the disease. Backlash is a mechanical problem that requires a mechanical solution.
Investing in zero backlash components, such as strain wave gears or direct drive motors, upgrades the fundamental capability of your machine. It allows for higher controller gains, faster settling times, and superior surface finishes.
Stop fighting the laws of physics with software patches. Eliminate the gap at the source. If you are struggling with accuracy issues in your design, for a consultation on the best zero-backlash solution for your needs.
FAQ Section: Common Questions About Backlash
Q1: Is it possible to have literally zero backlash? Yes. Strain wave gears (harmonic reducers) and direct drive motors are considered “zero backlash” technologies. In strain wave gears, the elastic preload ensures continuous tooth contact. In direct drive motors, there are no mechanical linkages to create play.
Q2: Does backlash increase over time as gears wear? In traditional spur or planetary gears, yes, wear increases the gap. However, strain wave gears are unique; because they rely on elastic deformation and many teeth engage simultaneously, they maintain their zero-backlash characteristic for a much longer percentage of their service life compared to traditional gears.
Q3: How do I measure backlash in my current system? The simplest method is to lock the input shaft (motor side) and place a dial indicator on the output arm at a known radius. Apply a small reversing torque to the output and measure the total displacement on the indicator.
Q4: What is the difference between backlash and torsional stiffness? Backlash is the gap you move through before engagement. Stiffness is how much the system bends