Joint Rotary Actuators Series HAT
Joint Rotary Actuators Series HAT Joint Rotary Actuators series HAS
Joint Rotary Actuators series HAS Joint Rotary Actuators Series HAMF
Joint Rotary Actuators Series HAMF Frameless Torque Motor HBM
Frameless Torque Motor HBM Rotary Actuators
Rotary Actuators Joint Rotary Actuators Series HAG
Joint Rotary Actuators Series HAG Rotary Actuators Series HPG
Rotary Actuators Series HPGIntroduction: The Engineering Foundation of Every Success
In the world of precision automation, accurate sizing is the difference between a high-performing system and a failed project. Engineers often face pressure to optimize for cost and size, but skipping the math is a dangerous gamble. Whether you are using a hollow rotary actuator or a direct-drive frameless motor, the torque requirement is not a guess—it is a calculated necessity.
Selecting an undersized actuator leads to overheating, mechanical failure, and system instability. Conversely, extreme oversizing adds unnecessary cost and consumes excessive energy. This guide provides a standardized framework to master torque calculation, ensuring your motion system operates with the reliability required for modern precision motion control.
The Torque Trio: Breaking Down Your Requirements
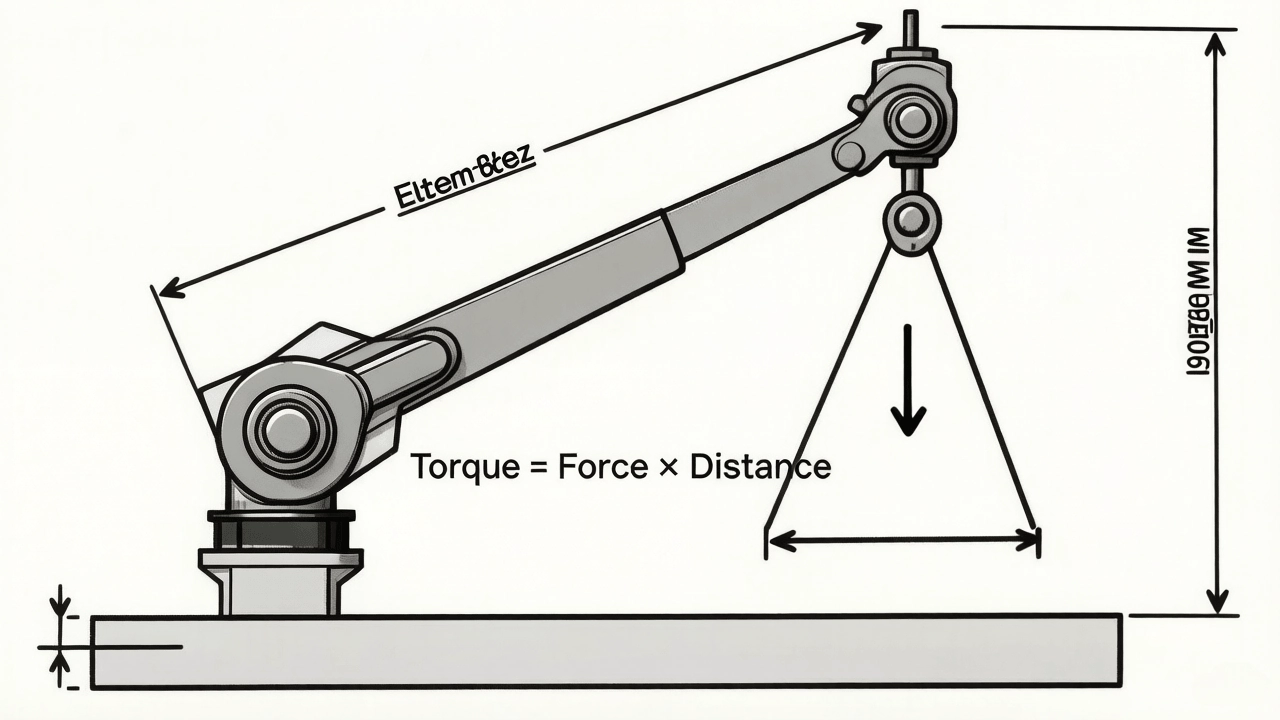
To find the total torque required at the actuator output, you must account for three distinct components: Load, Acceleration, and Friction.
Load Torque: Accounting for Gravity and Static Resistance
Load torque (or static torque) is the torque required to hold your system in place against external forces like gravity. If your robot arm is lifting a 5kg payload at a 0.5m radius, the actuator must provide enough holding torque to overcome the gravitational pull, even when the system is stationary.
Acceleration Torque: Overcoming System Inertia
Dynamic torque is needed during the acceleration and deceleration phases. If your system needs to move from a standstill to full speed in 0.5 seconds, the actuator must provide enough force to overcome the moment of inertia of both the arm and the payload. The faster you need to move, the more torque you need.
Friction Torque: The Often-Overlooked Factor
Every mechanical system has internal friction. Bearings, seals, and guide ways create resistance that the actuator must fight against. While usually smaller than the load or acceleration torque, ignoring friction can lead to “droop” at the end of a motion profile or failure to reach the target velocity.
A Closer Look at Inertia Calculation
Inertia calculation is frequently where sizing mistakes happen. Because inertia is proportional to the square of the distance from the rotation axis, even small changes in design (like moving a sensor further out on the arm) can have a massive impact on the required torque.
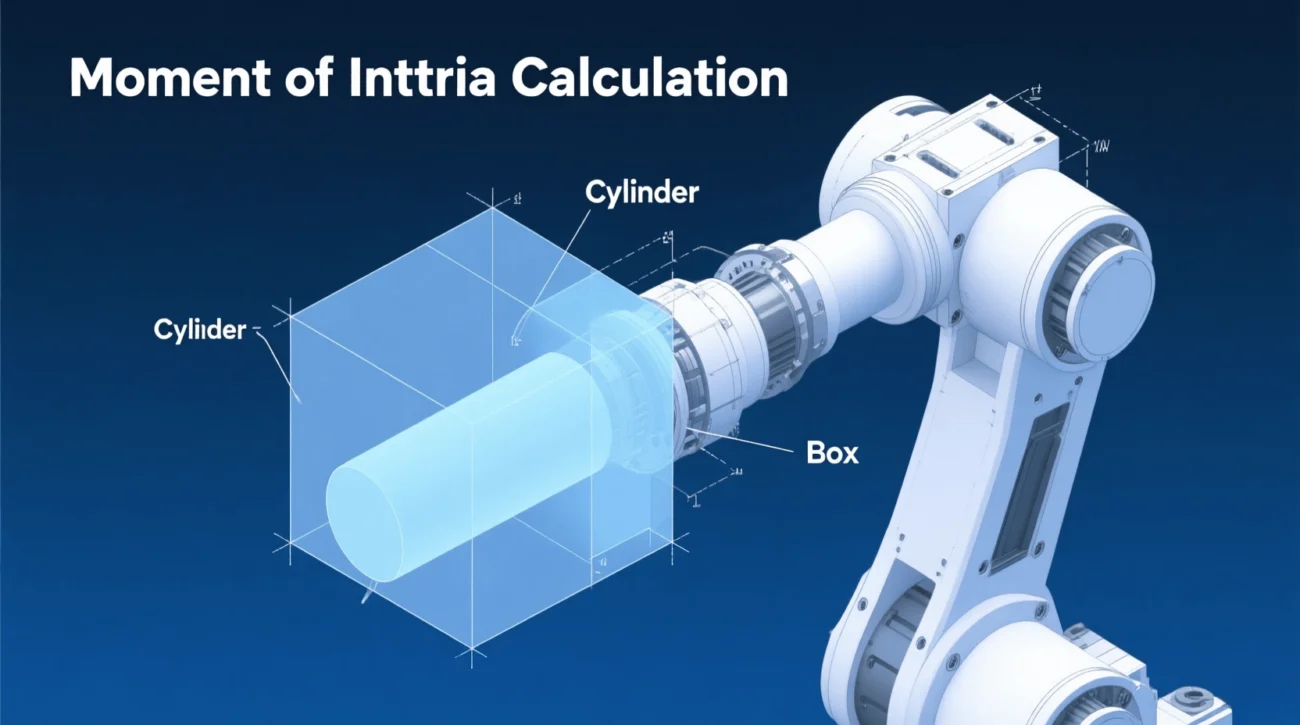
Calculating Load Inertia for Complex Geometries
For simple shapes like cylinders, formulas are straightforward. However, real-world robotic arms are complex. To get an accurate value, break the assembly down into basic geometric shapes—cylinders, prisms, and spheres—calculate the inertia for each relative to the rotation axis, and use the parallel axis theorem to sum them up.
The Importance of the Inertia Ratio in Servo Systems
It is not enough for the motor to be “strong enough.” The ratio of the load inertia to the motor inertia is critical for servo tuning. An inertia ratio that is too high (typically > 10:1) will make the control loop unstable, causing the motor to “hunt” for its target position rather than settling smoothly.
Motor Torque and the Safety Factor
Once you have your total torque value, you have a baseline. But you shouldn’t select an actuator that hits 100% of its limit.
Why You Should Never Select for 100% Load
Operating at 100% rated capacity means your motor is constantly generating heat, shortening the lifespan of your windings and bearings. It also leaves zero room for unexpected disturbances, such as a sudden friction spike due to cold lubricant or a slight increase in payload.
Determining the Right Safety Factor for Your Industry
A standard safety factor is 1.5x to 2.0x the calculated peak torque requirement. In high-precision industries like semiconductor handling, where repeatability is key, you might push toward 2.0x. For general automation, 1.5x is usually sufficient.
Conclusion: Precision Selection Leads to Precision Motion
Successful automation is built on a foundation of sound physics. By systematically evaluating load, acceleration, and friction, and by applying a reasonable safety factor, you ensure that your rotary actuator will perform reliably for years to come.
Remember, high-quality hardware like our HAT hollow rotary actuators or HBM frameless torque motors can only reach their full potential if they are sized correctly from the start.
Need to verify your torque calculation? We have developed technical tools to assist you. You can contact our engineering team today to review your project specs and get a professional sizing recommendation for your precision motion control application.
FAQ Section: Common Torque Selection Questions
Q1: How do I account for high-friction environments in my calculations?
You should add a specific friction torque component to your equation. This is often determined experimentally or estimated based on the coefficient of friction of your bearing and seal types.
Q2: Is there a simplified rule of thumb for quick estimations?
While you can estimate load torque quickly, dynamic torque requires calculation. Avoid “rules of thumb” for high-performance robotics—the risks of undersizing are simply too high.
Q3: What happens if my motor torque is undersized?
Your system will fail to reach target speeds, experience overheating due to high current draw, and suffer from poor settling times (it won’t stop where it’s supposed to).
Q4: Does the duty cycle affect my torque requirements?
Yes. A motor that operates 10% of the time can handle a higher peak torque than one operating 90% of the time, because it has more time to dissipate heat. Always check the RMS torque value against the motor’s thermal limits.