Joint Rotary Actuators Series HAT
Joint Rotary Actuators Series HAT Joint Rotary Actuators series HAS
Joint Rotary Actuators series HAS Joint Rotary Actuators Series HAMF
Joint Rotary Actuators Series HAMF Frameless Torque Motor HBM
Frameless Torque Motor HBM Rotary Actuators
Rotary Actuators Joint Rotary Actuators Series HAG
Joint Rotary Actuators Series HAG Rotary Actuators Series HPG
Rotary Actuators Series HPG
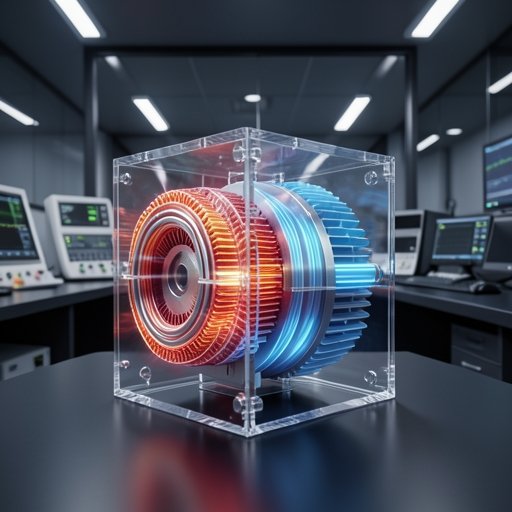
Every motion system begins with a choice: “To gear, or not to gear?” This is the architect’s dilemma in modern motion system design. You are balancing the laws of physics—torque, speed, inertia, and precision—against the realities of space, budget, and mechanical reliability.
A direct drive motor offers the purest form of motion, while a geared system provides the mechanical advantage needed for heavy lifting. Understanding when to leverage one over the other is the hallmark of a seasoned engineer. In this guide, we break down these two technologies to help you make the right choice for your next automation project.
Understanding Direct Drive (DD) Systems
Direct drive technology is the “cleanest” way to move a load. It couples the motor directly to the load, eliminating all intermediate transmission elements.
The Purest Form of Motion: No Backlash, No Friction
The absence of a gearbox means there is no mechanical “play.” You get zero backlash by design. Furthermore, you eliminate the friction losses associated with gear teeth, resulting in a system that is incredibly responsive, smooth, and predictable.

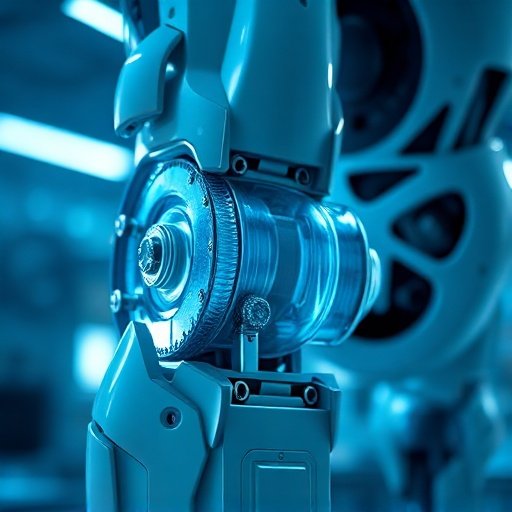
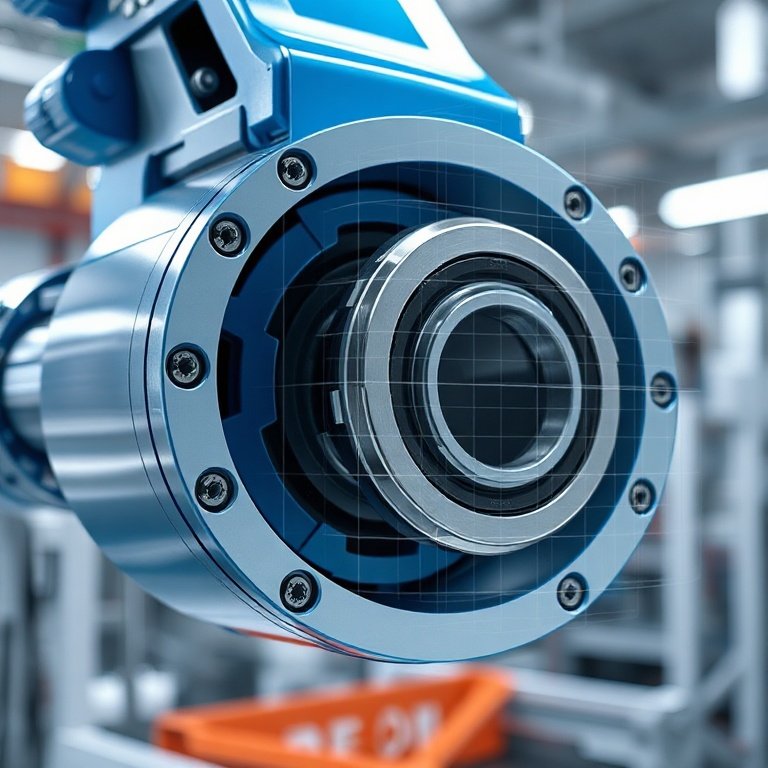
When to Leverage Frameless Motor Technology
Frameless motor technology is the heart of most direct drive systems. Because it lacks a housing, it is the ultimate tool for integration. If your design goal is a low-profile, minimalist robot joint or a highly responsive CNC rotary axis, leveraging a frameless motor is the standard approach for top-tier performance.
The Mechanics of Geared Systems
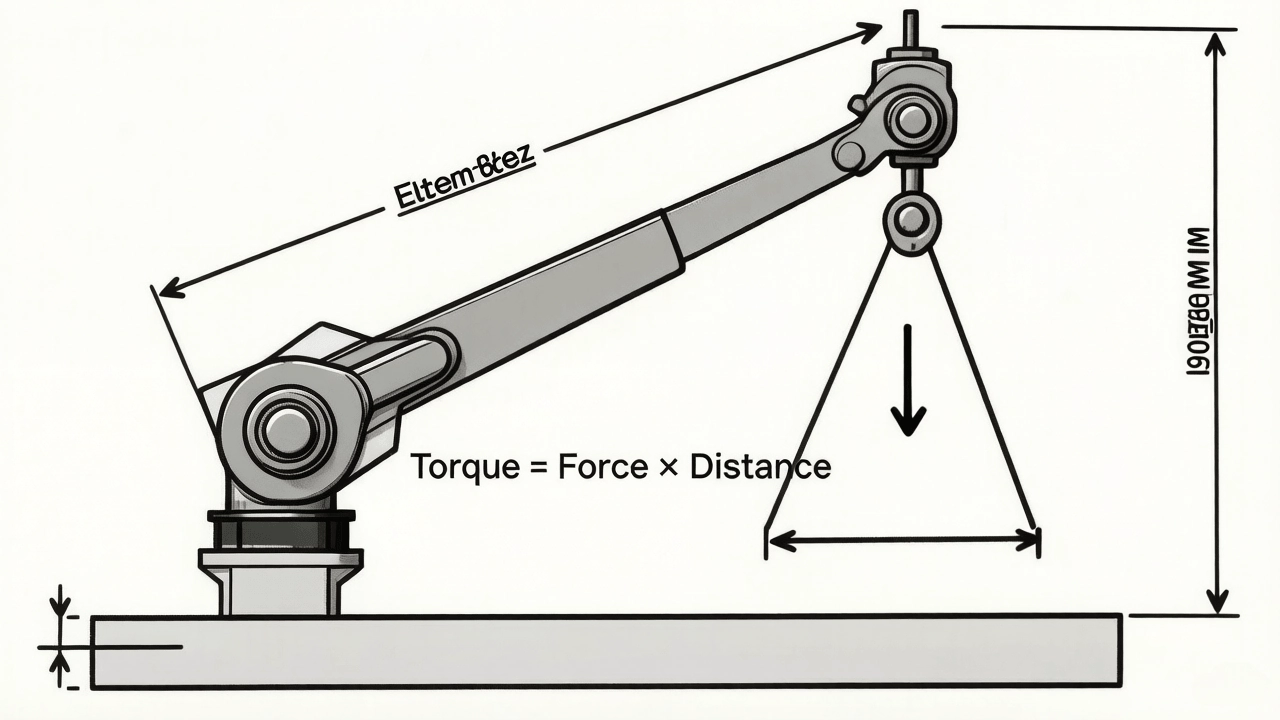
Geared systems are the heavy lifters of the engineering world. They use mechanical advantage to convert high-speed, low-torque motor output into low-speed, high-torque work.
Achieving High Torque in a Small Package
In many applications, you cannot simply use a larger motor to get more torque; the weight would become unmanageable. A geared system allows you to use a small, fast motor and “gear it down.” This provides the necessary torque while keeping the motor footprint small.
The Role of Reduction Ratios in Load Matching
A crucial aspect of system design is inertia matching. If your load inertia is 100 times larger than your motor inertia, your system will be unstable. A gearbox acts as an “inertia transformer.” By applying a reduction ratio (N), you reduce the reflected inertia of the load by N-squared. This makes the system far easier to tune and control.
Comparative Analysis: Factors That Drive Your Decision
When the design phase begins, evaluate these four critical pillars.
Accuracy and Repeatability (Backlash vs. No Backlash)
If your application requires micron-level repeatability—such as laser micro-machining or precision assembly—direct drive motors are superior because they bypass transmission errors. If you need good accuracy but high torque, a high-precision geared system is more than sufficient.
Dynamic Response and Acceleration
Direct drive systems offer the highest possible dynamic response because there is no gear compliance to “wind up” before moving. However, geared systems can often accelerate faster if the load inertia is very high, because the gear reduction helps the motor “see” a smaller reflected inertia.
Efficiency, Heat, and Maintenance
Direct drive is more efficient because it doesn’t lose energy through mechanical friction. Gearboxes, while efficient, eventually require lubrication and will face wear over time. If your machine is in a sealed, high-vacuum, or cleanroom environment, direct drive is usually preferred to avoid contamination.
System Complexity and Cost Considerations
Direct drive systems often simplify the bill of materials (fewer parts) but can be more demanding on the motor controller’s processing power to maintain accuracy. Geared systems might have more mechanical parts but are often “easier” to get running in less demanding applications.
Application Guide: Choosing the Right Path
Ideal Scenarios for Direct Drive Motors
-
High-speed, low-load applications.
-
Environments where lubricants cannot be used.
-
Applications requiring extreme smooth motion (gimbals, optical scanning).
-
Scenarios where space is extremely limited, and you can integrate components into the machine housing.
Where Geared Actuators Remain Indispensable
-
Heavy-duty lifting (e.g., large robotic bases).
-
Applications where high torque is required at slow speeds.
-
Systems with high inertia mismatch that cannot be overcome by motor power alone.
-
Cost-sensitive applications where standard components are preferred over custom direct drive integrations.
Conclusion: Balancing Performance for Your Unique Automation System
There is no “better” technology—only the technology that is better suited for your specific load, speed, and precision requirements. The decision is a trade-off between the mechanical simplicity of direct drive and the torque-multiplying strength of geared systems.
By clearly defining your system’s inertia, speed, and precision targets, you can choose the path that delivers the best machine performance. Whether you opt for a high-efficiency frameless motor or a robust geared actuator, the goal remains the same: reliable, consistent motion.
FAQ Section: Engineering Q&A
Q1: Can I convert a direct drive system to geared later? It is difficult. Direct drive systems are typically integrated into the machine structure. Adding a gearbox later would require significant re-design of the machine housing, bearings, and output shaft.
Q2: How does inertia ratio affect the choice between DD and Geared? High load inertia relative to motor inertia is the primary argument for a gearbox. If your inertia ratio exceeds 10:1, adding gear reduction is the most effective way to improve stability and control.
Q3: Are frameless motors more difficult to install than geared actuators? Yes. Frameless motors require precision alignment of the stator and rotor and the installation of custom bearings. Geared actuators (especially those delivered as a module) are pre-assembled and are essentially “bolt-on” solutions.
Q4: What is the most common mistake when comparing these two?