Joint Rotary Actuators Series HAT
Joint Rotary Actuators Series HAT Joint Rotary Actuators series HAS
Joint Rotary Actuators series HAS Joint Rotary Actuators Series HAMF
Joint Rotary Actuators Series HAMF Frameless Torque Motor HBM
Frameless Torque Motor HBM Rotary Actuators
Rotary Actuators Joint Rotary Actuators Series HAG
Joint Rotary Actuators Series HAG Rotary Actuators Series HPG
Rotary Actuators Series HPG
Introduction: The Dawn of the General-Purpose Humanoid
We are witnessing a historical pivot point in robotics. For decades, humanoid robots were confined to expensive research laboratories, performing pre-programmed tasks in controlled environments. Today, driven by breakthroughs in Artificial Intelligence and high-density hardware, the humanoid robot is evolving into a viable tool for the real world.
While the “Brain” of the robot (AI) has seen exponential growth through Large Language Models, the “Muscles”—the motion control systems—face a much harder challenge: the laws of physics. For a robot to navigate a human home or a dynamic factory floor, its joints must be stronger, lighter, and more intelligent than ever before. This article explores the critical role of motion control in shaping the future of automation.
The Core Challenge: Sizing and Torque Density in Humanoid Joints
Humanoid robots are fundamentally different from industrial robot arms. An industrial arm is bolted to the floor; a humanoid must carry its own weight, its power source, and its payload while balancing on two legs.
SWaP-C: Size, Weight, Power, and Cost
In the aerospace and defense sectors, engineers often talk about SWaP-C. This acronym is now the driving force behind humanoid development. Every joint must be miniaturized to fit within a human-like envelope, yet powerful enough to perform heavy lifting. This requires a level of integration that traditional industrial components cannot provide.
Why Every Gram Counts in Bipedal Balance
Weight distribution is critical for stability. Adding even a few hundred grams to a robot’s “ankle” or “wrist” increases the inertia the leg joints must overcome to maintain balance. To achieve fluid, human-like walking, engineers are pushing for materials and designs that maximize torque while shedding every possible gram of dead weight.
The Evolution of the Integrated Robotic Joint Module
The trend in humanoid design is moving away from assembling separate motors and gearboxes toward the use of a fully integrated robotic joint module.
Transitioning from Discrete Components to All-in-One Modules
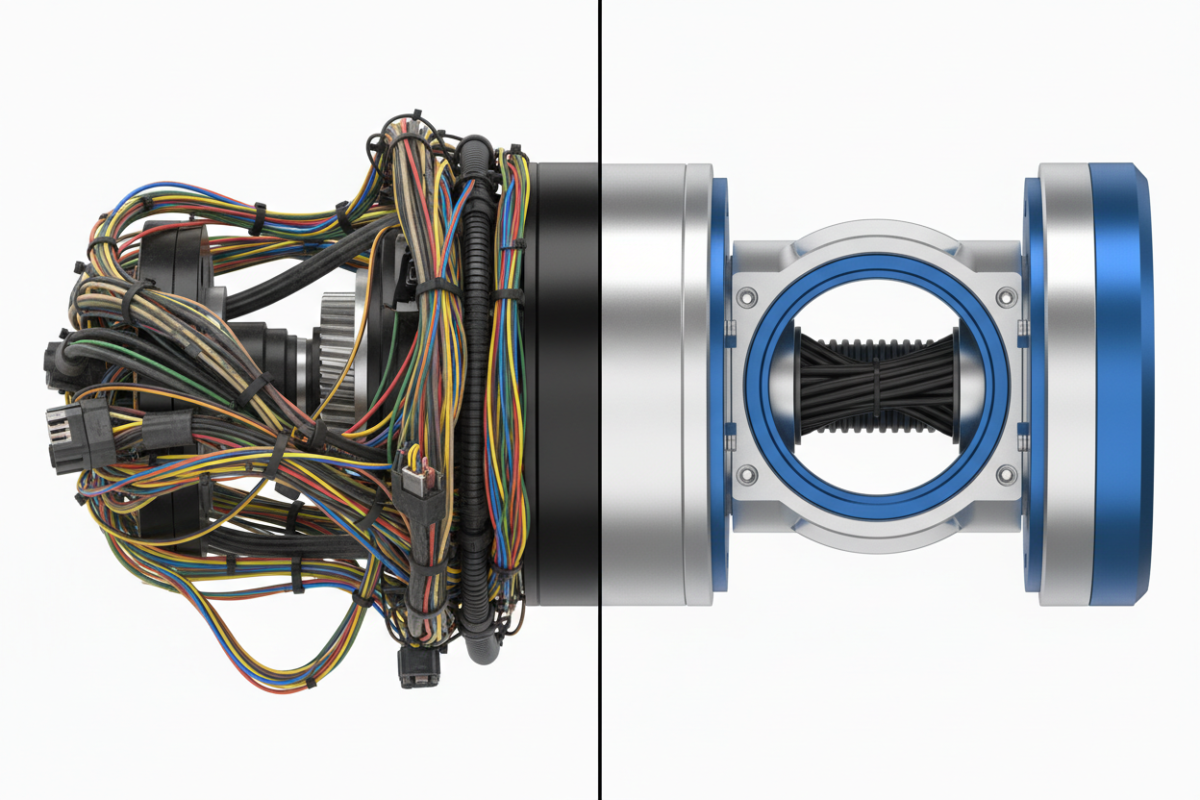
In a modern humanoid joint, the motor, precision reducer, brake, and sensors are no longer separate parts bolted together. They are co-designed into a single, unified housing. This “Integrated” approach eliminates heavy couplings and redundant brackets, resulting in a joint that is significantly more compact and reliable.
The Vital Role of High-Torque Frameless Motors
At the heart of these modules is the frameless torque motor. By removing the traditional motor housing and integrating the stator and rotor directly into the joint’s structure, engineers can achieve higher torque density and better thermal management. These motors provide the high “peak torque” required for the robot to recover from a trip or to perform an explosive movement like jumping.
Solving the Bio-Inspired Motion Control Problem
Making a robot walk is easy; making it walk like a human is incredibly difficult. Human motion is characterized by “compliance”—the ability to absorb impact and adapt to the environment.
Achieving Explosive Power for Jumping and Impact Resistance
A humanoid’s knee joint must survive the massive impact forces of walking and jumping. This requires gearboxes (like high-precision planetary or strain wave gears) that can handle impact loads up to three times their rated torque without cracking.
Implementing Force Control and Compliance for Human Safety
Unlike caged industrial robots, humanoids will work among us. This demands “Force Control.” Integrated joint modules must be sensitive enough to detect a human touch and respond by “softening” the joint’s resistance. This bi-directional communication between the joint and the controller is the foundation of safe human-robot interaction.
How Modular Hardware Accelerates the Future of Automation
The commercial success of humanoids depends on scale. We cannot have a “general-purpose” robot if each one costs a million dollars to build.
Standardizing Joints for Rapid Prototyping
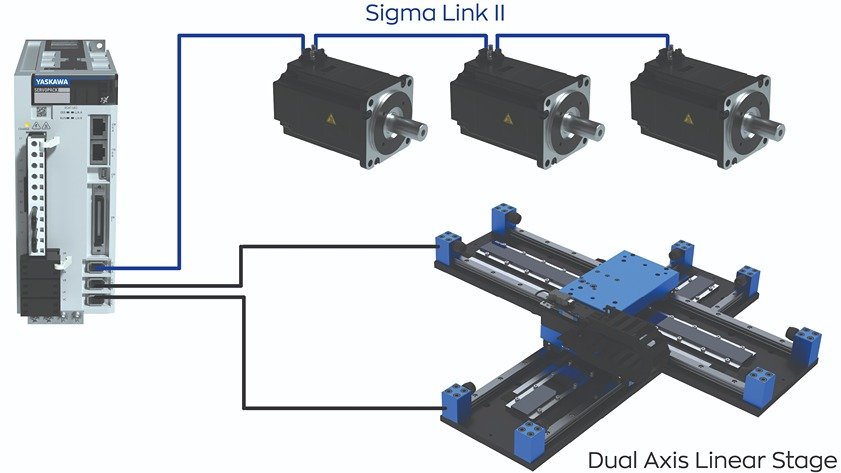
Modular joint modules allow companies to build and iterate on robot designs in months rather than years. By using standardized modules for different joint sizes (large for hips, medium for elbows, small for wrists), manufacturers can simplify their engineering and supply chains.
Reducing Unit Cost Through Supply Chain Integration
As the industry standardizes on these modular components, the cost of high-precision motion will drop. This democratization of hardware will allow the future of automation to expand beyond the automotive factory and into logistics, healthcare, and eventually, our homes.
Conclusion: Empowering the Next Generation of Mechanical Life
The humanoid revolution is no longer a question of “if,” but “when.” While AI will give these machines the intelligence to understand our world, high-performance motion control will give them the physical capability to interact with it.
The hardware “Muscle” must be as smart and efficient as the AI “Brain.” By focusing on high torque density, integrated design, and modular scalability, we are building the structural foundation for a new era of mechanical life. The robots of tomorrow are being built today, one joint at a time.
FAQ Section: Humanoid Technology FAQs
Q1: Why is battery life the biggest hurdle for humanoid robots?
Humanoids are energetically expensive. Moving a 60kg mass on two legs requires constant torque from dozens of motors simultaneously. Improving motor efficiency and reducing the weight of the robotic joint module is essential to extending operational time beyond a few hours.
Q2: Can frameless torque motors handle the high impact of walking?
Yes, when paired with the right mechanical structure and bearings. Frameless motors themselves are very robust as they have no internal bearings to fail. The challenge lies in protecting the integrated gearbox from the shock loads of bipedal locomotion.
Q3: What is the ideal gear ratio for a humanoid knee joint?
There is no single “ideal” ratio, but most humanoids use ratios between 30:1 and 100:1. A lower ratio allows for “back-drivability” and better force sensing, while a higher ratio provides the raw torque needed to lift the robot’s body weight.